如若轉載,請注明出處:http://m.dangdituan.com/product/21.html
更新時間:2026-06-18 03:01:12
廣電媒體與網紅景點的化學反應 北京廣播電視臺的創新實踐
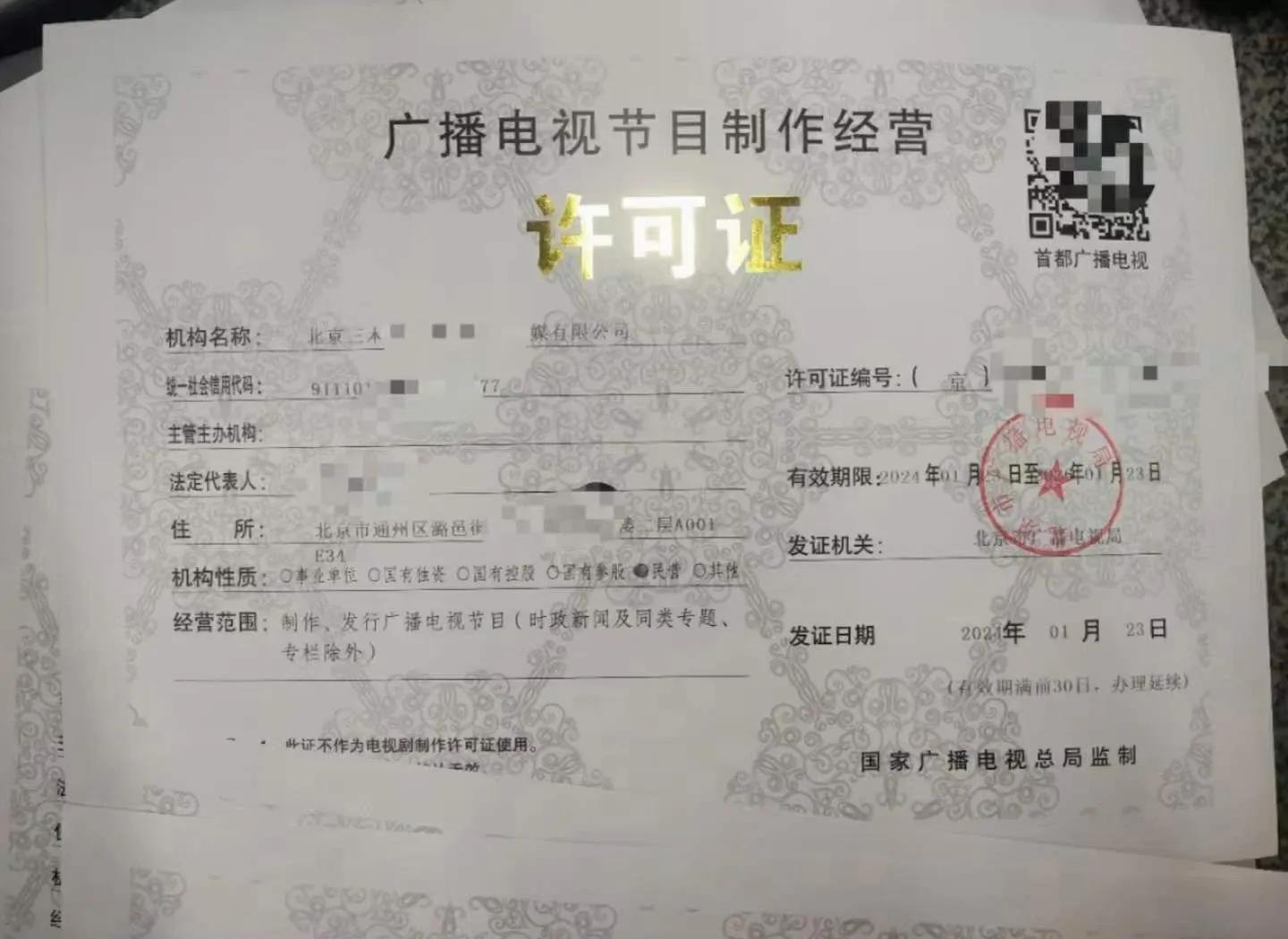
辦理廣播電視節目制作經營許可證 必備材料全解析
從“張同學”到“張老板” 網紅經濟與鄉村振興的奇妙碰撞
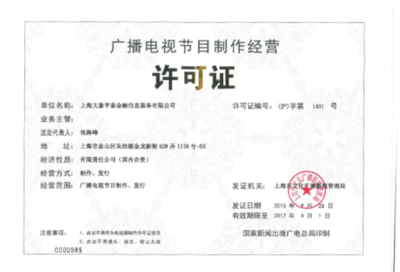
大象金服獲文廣總局廣播電視節目經營許可,金融科技跨界布局引關注
濱湖校區周末考級班學生參與《祝福驛站》欄目錄制,探索廣播電視節目制作經營魅力
上海辦理廣播電視節目制作經營許可證后能從事的業務范圍
從北京到巴黎 總臺精品節目音像制品發布,讓精彩永恒
奮楫者先,中央廣播電視總臺財經節目中心2023年下半年精品節目片單發布
我臺在省廣播電視局優秀新聞作品和廣播電視節目評選中喜獲佳績
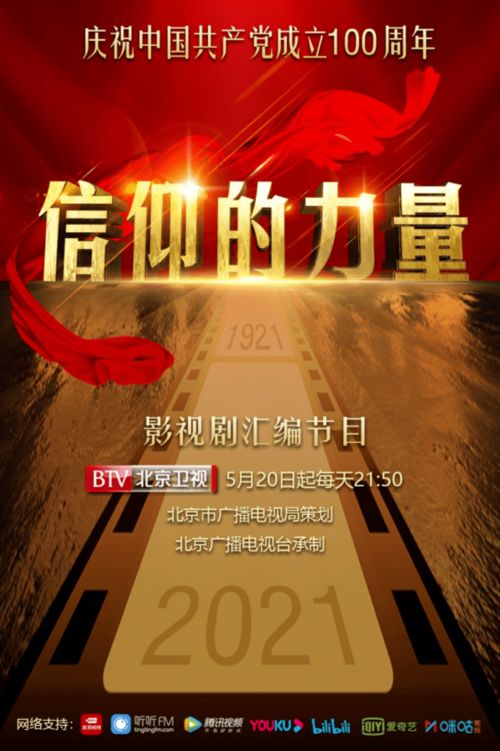
《信仰的力量》 光影中的百年精神,熒屏上的初心傳承
電話:4001064**
地址:北京市海淀區西二旗西路16號院11號樓6層101
Copyright © 2026 m.dangdituan.com 廣播電視節目制作經營 北京彈幕網絡科技有限公司 廣播電視節目制作經營 版權所有 Sitemap